.jpg)
.jpg)
.jpg)
.jpg)
„Nema 11“ (28 mm) hibridinis žingsninis variklis, bipolinis, 4 laidų, ACME srieginis, tylus, ilgas tarnavimo laikas, didelis našumas.
„Nema 11“ (28 mm) hibridinis žingsninis variklis, bipolinis, 4 laidų, ACME srieginis, tylus, ilgas tarnavimo laikas, didelis našumas.
Šis 28 mm hibridinis žingsninis variklis yra trijų tipų: varomas išoriškai, su kiaurai judančia ir fiksuota kiaurai judančia ašimi. Galite pasirinkti pagal savo konkrečius poreikius.
Maksimali trauka iki 240 kg, mažas temperatūros kilimas, maža vibracija, mažas triukšmas, ilgas tarnavimo laikas (iki 5 milijonų ciklų) ir didelis padėties nustatymo tikslumas (iki ±0,01 mm)
Standartinio VSM28HSM išorinio variklio kontūro brėžinys:
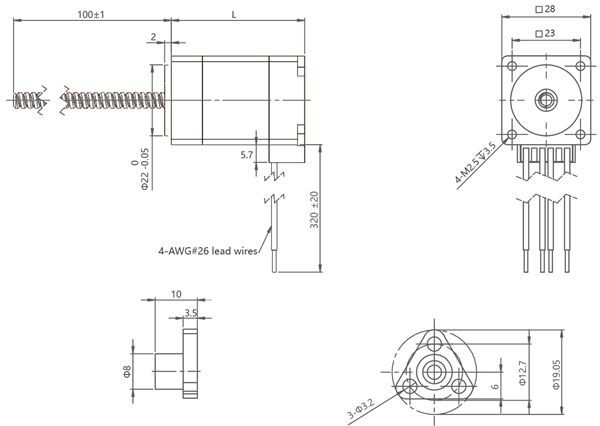
Pastabos:
Švino varžto ilgį galima pritaikyti
Individualus apdirbimas yra įmanomas švino sraigto gale
Aprašymai
| Produkto pavadinimas | 20 mm išoriškai varomi hibridiniai žingsniniai varikliai |
| Modelis | VSM20HSM |
| Tipas | hibridiniai žingsniniai varikliai |
| Žingsnio kampas | 1,8° |
| Įtampa (V) | 2,5 / 6,3 |
| Srovė (A) | 0,5 |
| Varža (omai) | 5,1 / 12,5 |
| Induktyvumas (mH) | 1,5 / 4,5 |
| Švino laidai | 4 |
| Laikymo sukimo momentas (Nm) | 0,02 / 0,04 |
| Variklio ilgis (mm) | 30 / 42 |
| Aplinkos temperatūra | -20 ℃ ~ +50 ℃ |
| Temperatūros kilimas | 80 tūkst. maks. |
| Dielektrinė stiprybė | 1 mA maks. esant 500 V, 1 kHz, 1 s. |
| Izoliacijos varža | 100 MΩ min. esant 500 V nuolatinei varžai |
Sertifikatai

Elektriniai parametrai:
| Variklio dydis | Įtampa / Fazė (V) | Dabartinis/ Fazė (A) | Pasipriešinimas/ Fazė (Ω) | Induktyvumas / Fazė (mH) | Skaičius Švino laidai | Rotoriaus inercija (g.cm2) | Laikymo sukimo momentas (Nm) | Variklio ilgis L (mm) |
| 20 | 2.5 | 0,5 | 5.1 | 1.5 | 4 | 2 | 0,02 | 30 |
| 20 | 6.3 | 0,5 | 12,5 | 4.5 | 4 | 3 | 0,04 | 42 |
Bendrieji techniniai parametrai:
| Radialinis prošvaisa | 0,02 mm maks. (450 g apkrova) | Izoliacijos varža | 100 MΩ esant 500 V nuolatinei srovei |
| Ašinis prošvaisa | 0,08 mm maks. (450 g apkrova) | Dielektrinis stiprumas | 500 V kintamoji srovė, 1 mA, 1 s esant 1 kHz dažniui |
| Maksimali radialinė apkrova | 15 N (20 mm nuo flanšo paviršiaus) | Izoliacijos klasė | B klasė (80 tūkst.) |
| Maksimali ašinė apkrova | 5N | Aplinkos temperatūra | -20 ℃ ~ +50 ℃ |
Varžtų specifikacijos:
| Švino varžto skersmuo (mm) | Švinas (mm) | Žingsnis (mm) | Išjungimo savaiminio fiksavimo jėga (N) |
| 3.5 | 0,6096 | 0,003048 | 80 |
| 3.5 | 1 | 0,005 | 40 |
| 3.5 | 2 | 0,01 | 10 |
| 3.5 | 4 | 0,02 | 1 |
| 3.5 | 8 | 0,04 | 0 |
Sukimo momento ir dažnio kreivė
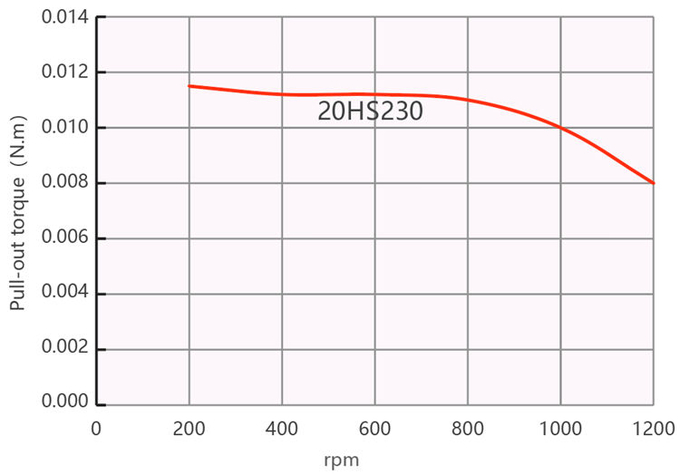
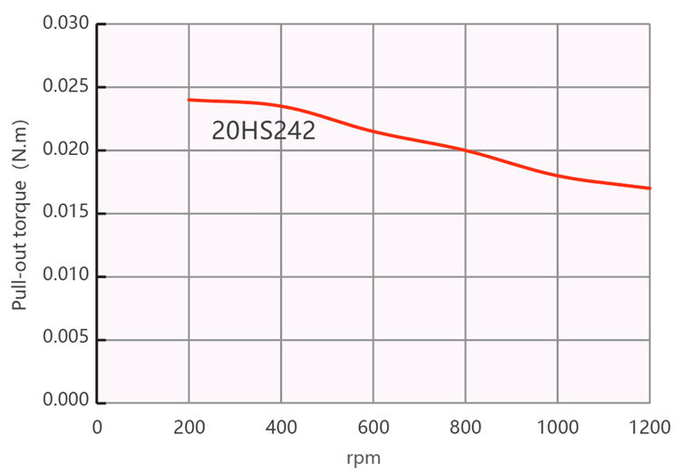
Bandymo sąlygos:
Smulkintuvo pavara, pusės mikrožingsnio, pavaros įtampa 24 V
Taikymo sritys
3D spausdinimas:20 mm hibridiniai žingsniniai varikliai gali būti naudojami judesio valdymui 3D spausdintuvuose, kad būtų galima valdyti spausdinimo galvutę, staliuko padėtį ir ašinio judesio sistemą.
Automatikos įranga: Šie žingsniniai varikliai dažniausiai naudojami automatikos įrangoje, pvz., automatinėse pakavimo mašinose, automatinėse surinkimo linijose, automatinėse robotų rankenose ir kt., siekiant valdyti tikslią padėtį ir greitį.
Robotika:Robotų srityje 20 mm hibridiniai žingsniniai varikliai naudojami robotų sąnarių judesiams valdyti, siekiant tiksliai kontroliuoti padėtį ir padėtį.
CNC staklės:Šie žingsniniai varikliai taip pat naudojami CNC staklėse, siekiant tiksliai judinti įrankius ar stalus, kad būtų galima atlikti didelio tikslumo apdirbimą.
Medicininė įranga:Medicinos įrangoje 20 mm hibridiniai žingsniniai varikliai gali būti naudojami tiksliai valdyti medicinos įrangos komponentų, tokių kaip chirurginiai robotai ir vaistų tiekimo sistemos, judėjimą.
Automobilių įranga:Automobilių pramonėje šie žingsniniai varikliai gali būti naudojami automobilių komponentų, tokių kaip langų pakėlimo ir nuleidimo sistemos, sėdynių reguliavimo sistemos ir pan., padėčiai ir judėjimui valdyti.
Išmanieji namai:Išmaniųjų namų srityje 20 mm hibridiniai žingsniniai varikliai gali būti naudojami užuolaidų atidarymui ir uždarymui, namų apsaugos sistemų kamerų sukimui ir kt. valdyti.
Tai tik kelios dažniausiai pasitaikančios 20 mm hibridinių žingsninių variklių taikymo sritys. Tiesą sakant, žingsniniai varikliai yra plačiai pritaikomi įvairiose pramonės šakose ir srityse. Konkretūs naudojimo scenarijai taip pat priklauso nuo jų konkrečių specifikacijų, našumo ir valdymo reikalavimų.
Privalumas
Tikslumas ir padėties nustatymo galimybės:Hibridiniai žingsniniai varikliai pasižymi dideliu tikslumu ir padėties nustatymo galimybėmis, leidžiančiomis atlikti tikslius žingsninius judesius, dažnai su mažais žingsnelių kampais, tokiais kaip 1,8 laipsnio arba 0,9 laipsnio, todėl padėties valdymas yra tikslesnis.
Didelis sukimo momentas ir didelis greitis:Hibridiniai žingsniniai varikliai yra konstrukciškai suprojektuoti taip, kad užtikrintų didelį sukimo momentą ir, tinkamai parinktu valdikliu, didelį greitį. Dėl to jie tinka taikymams, kuriems reikalingas ir didelis sukimo momentas, ir didelis judėjimo greitis.
Valdymas ir programavimas:Hibridiniai žingsniniai varikliai yra atviros grandinės valdymo sistema, pasižyminti geru valdymu. Valdiklis gali tiksliai valdyti kiekvieną judesio žingsnį, todėl judesių sekos yra lengvai programuojamos ir valdomos.
Paprastas vairavimas ir valdymas:Hibridiniai žingsniniai varikliai, palyginti su kitų tipų varikliais, turi gana paprastą pavaros ir valdymo grandinę. Jiems nereikia naudoti padėties grįžtamojo ryšio įtaisų (pvz., kodavimo įrenginių) ir juos galima tiesiogiai valdyti atitinkamais tvarkyklėmis ir valdikliais. Tai supaprastina sistemos projektavimą ir diegimą bei sumažina sąnaudas.
Didelis patikimumas ir stabilumas:Hibridiniai žingsniniai varikliai pasižymi dideliu patikimumu ir stabilumu dėl savo paprastos konstrukcijos, mažo judančių dalių skaičiaus ir bešepetėlio konstrukcijos. Jiems nereikia reguliarios priežiūros, jie tarnauja ilgai ir tinkamai naudojant bei eksploatuojant užtikrina stabilų veikimą.
Energiją taupantis ir mažai triukšmo sukeliantis:Hibridiniai žingsniniai varikliai yra energiją taupantys, užtikrindami didelį išėjimo sukimo momentą esant santykinai mažai galiai. Be to, jie paprastai veikia taip, kad sukeltų mažesnį triukšmo lygį, todėl turi pranašumą triukšmui jautriose srityse.
Variklio pasirinkimo reikalavimai:
►Judėjimo / montavimo kryptis
►Apkrovos reikalavimai
►Eilutės reikalavimai
►Galinio apdirbimo reikalavimai
►Tikslumo reikalavimai
►Kodavimo įrenginio grįžtamojo ryšio reikalavimai
►Rankinio reguliavimo reikalavimai
►Aplinkosaugos reikalavimai
Gamybos dirbtuvės



Atsiųskite mums savo žinutę:
Produktų kategorijos
-
-300x300.jpg)
„Nema 34“ (86 mm) hibridinis žingsninis variklis, bipolinis, 4...
-
-300x300.jpg)
Nema 23 (57 mm) hibridinis žingsninis variklis, bipolinis, 4...
-
-300x300.jpg)
„Nema 8“ (20 mm) hibridinis žingsninis variklis, bipolinis, 4...
-
-300x300.jpg)
Nema 17 (42 mm) hibridinis žingsninis variklis, bipolinis, 4...
-
-300x300.jpg)
Nema 14 (35 mm) hibridinis žingsninis variklis, bipolinis, 4...